تقنية جديدة لرفع كفاءة قبضة الروبوتات
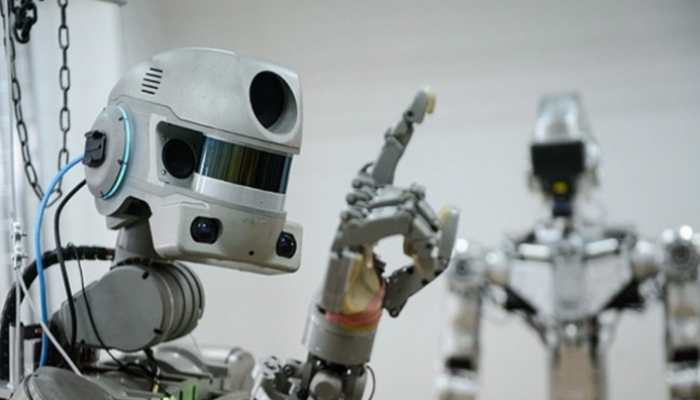
التقنية التي توصل إليها باحثون في معهد "ماساشوسيتس" للتكنولوجيا تسمح للروبوت بتعديل وضعية قبضته على الأشياء
طور فريق من الباحثين في الولايات المتحدة تقنية جديدة تساعد الروبوتات على الإمساك بالأشياء الدقيقة بشكل أفضل.
وتسمح التقنية التي توصل إليها باحثون في معهد "ماساشوسيتس" للتكنولوجيا للروبوت بتعديل وضعية قبضته على الأشياء عن طريق دحرجتها على سطح صلب في البداية قبل الإمساك بها.
وفي حين أن المعادلات الخوارزمية المستخدمة حاليا لتنفيذ هذه الخطوة تجعل الروبوت يستغرق عشرات الدقائق من أجل تعديل وضعية قبضته للإمساك بالأشياء، تسمح التقنية الجديدة للروبوت بإجراء عملية التقييم خلال أقل من ثانية.
ونقل الموقع الإلكتروني "فيز دوت أورج" المتخصص في التكنولوجيا، عن الباحث ألبرتو رودريجز، أستاذ مساعد الهندسة الميكانيكية بمعهد "ماساشوسيتس"، قوله إن تسريع عملية التخطيط للإمساك بالأغراض سوف يسمح للروبوتات، لا سيما التي تعمل في المجال الصناعي، بتحديد درجة القوة المطلوبة للإمساك بالأشياء.
وأكد أن هذه التقنية تنطوي على أهمية كبيرة عند قيام الروبوت بمهام تتعلق بالتقاط الأشياء أو فرزها وتصنيفها، أو عند تكليف الروبوت بالإمساك بمعدة معينة واستخدامها.
وتعتمد التقنية التي طورها الباحثون بالمعهد على ما يعرف باسم "أقماع الحركة"، وهي عبارة عن منظومة من البرمجيات يتم تغذيتها داخل الروبوت، وتأخذ شكل أقماع افتراضية تساعد الروبوت على رسم مسار الحركة وحجم الضغط المطلوب منه أثناء الإمساك بمختلف الأشياء، مع الالتزام بمختلف المعايير الفيزياء اللازمة لإتمام هذه العملية، مثل معدلات الضغط والاحتكاك وغيرهما.
وأوضح رودريجز "يمثل الجزء الداخلي من القُمع عناصر الضغط التي يمكن تطبيقها على الجسم المراد الإمساك به، في حين أن الجزء الخارجي يمثل جميع العناصر التي قد تؤدي إلى إفلات الجسم من قبضة الروبوت".
ويقول الباحثون إنها طريقة معقدة، ولكنها تؤدي إلى نتائج أسرع مقارنة بالأساليب التقليدية المعمول بها في الوقت الحالي.