عالمة عربية تكشف آلية تصميم سمكة روبوتية لمراقبة البيئة البحرية (حوار)
كيف يمكن للتكنولوجيا استكشاف الشعاب المرجانية والمناطق الساحلية الحساسة دون أن تخل بتوازنها الدقيق؟.
من هذا السؤال وُلد ابتكار مصري طموح داخل جامعة النيل، يسعى إلى إعادة تعريف الروبوتات المائية، ليس كآلات صلبة، بل ككائنات مرنة مستوحاة من الطبيعة، تتحرك بانسجام يشبه حركة الأسماك الحقيقية.
في هذا الحوار، تحدثنا مع الدكتورة إيرين سامي فهيم، مدير مركز أبحاث أنظمة الهندسة الذكية بجامعة النيل، عن السمكة الروبوتية اللينة، وفلسفة تصميمها، وآفاق استخدامها في البحث العلمي وحماية البيئة.

بداية، ما الفكرة الأساسية التي ينطلق منها هذا المشروع؟
الفكرة الجوهرية هي تطوير روبوتات مائية تستطيع العمل داخل البيئات الحساسة دون التسبب في أي إزعاج أو ضرر. نحن لا نريد روبوتًا "يقتحم" الطبيعة، بل نظاما يتكيف معها. لذلك اعتمدنا على الدمج بين الإلهام البيولوجي من الكائنات البحرية، وهندسة المواد اللينة، وأنظمة التحكم الذكية.
ما الذي يميز السمكة الروبوتية التي طورتموها عن التصاميم التقليدية؟
صممنا سمكة روبوتية لينة تعتمد في حركتها على نظام الأوتار بدلًا من المفاصل والمحركات الصلبة. هذه الأوتار الدقيقة تنقل الحركة بسلاسة داخل جسم الروبوت المصنوع من مواد مرنة، ما ينتج حركة سباحة انسيابية تشبه إلى حد كبير حركة الأسماك الحقيقية، مع قدرة عالية على المناورة في المساحات الضيقة والبيئات المعقدة.
وما أهمية هذه المرونة من الناحية العملية؟
المرونة ليست شكلا جماليا فقط، بل عنصرا أساسيا لعمل الروبوت في بيئات شديدة الحساسية، مثل الشعاب المرجانية أو المناطق الساحلية الهشة. الروبوت اللين يقلل من خطر الاصطدام أو إثارة الرواسب، ما يجعله أداة مثالية لمهام المراقبة البيئية، ودراسة النظم الإيكولوجية، ورصد التغيرات الدقيقة في جودة المياه.
ماذا عن قدرات الحركة والتحكم؟
النسخة الحالية تتمتع بقدرات حركة متقدمة، تشمل السباحة للأمام والالتفاف يمينًا ويسارًا بسلاسة، إضافة إلى التحكم الدقيق في العمق. ويعتمد ذلك على نظام ذكي لإدارة الطفو، يتحكم في كثافة الروبوت عبر إدخال المياه أو إخراجها، ما يسمح له بالغوص أو الصعود حسب الحاجة.

وكيف يضمن الروبوت الثبات أثناء العمل لفترات طويلة؟
زودنا الروبوت بحساسات للضغط والعمق، إلى جانب خوارزميات تحكم متخصصة، تتيح له الحفاظ على عمق ثابت بدقة عالية. هذه الخاصية حاسمة في مهام الرصد أو التصوير طويلة الأمد، حيث يكون الاستقرار عاملًا أساسيا لجودة البيانات.
هل يمكن تكييف الروبوت لمهام بحثية مختلفة؟
بالتأكيد. صممنا هيكلًا معياريا يسمح بإعادة تهيئة الروبوت بسهولة. يمكن تزويده بكاميرات عالية الدقة للتصوير تحت الماء، أو دمج مستشعرات لقياس درجة الحرارة والملوحة والعكارة، دون التأثير على كفاءة السباحة أو استقرار الأداء. هذا يجعل الروبوت منصة بحثية مرنة وقابلة للتطوير مستقبلًا.
حدثينا عن منظومة التشغيل والدعم المصاحبة لهذا الابتكار؟
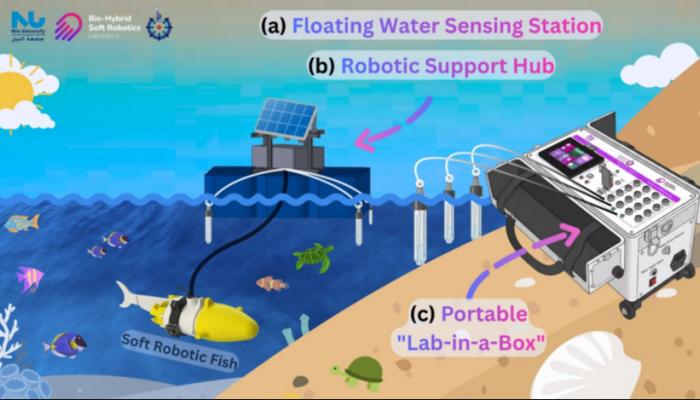
الروبوت جزء من منظومة متكاملة تُعرف باسم “مركز العمليات المائية المفتوحة”، صُممت لدعم الروبوتات المائية وجمع البيانات البيئية. يمكن تشغيلها كوحدات محمولة للتحليل السريع، أو منصات عائمة مستقلة تعمل بالطاقة الشمسية، أو مراكز دعم تتحكم في الروبوتات وتغذيها بالطاقة أثناء المهام الممتدة.
كيف يتم التواصل مع الروبوت في ظل صعوبة الاتصالات تحت الماء؟
نعتمد على بنية اتصال هجينة تجمع بين الوصلات السلكية الموثوقة تحت الماء، والاتصالات اللاسلكية بعيدة المدى فوق السطح. هذا يضمن تدفق الأوامر وبيانات الاستشعار بسلاسة حتى في الظروف البيئية الصعبة، وقد أثبتت الاختبارات الميدانية كفاءة هذا التكامل.

كيف ترين مستقبل هذا النوع من الروبوتات؟
هذا المشروع نموذج واضح لكيف يمكن للبحث العلمي التطبيقي أن يتحول إلى تكنولوجيا ذات أثر حقيقي. نحن نؤمن بأن مستقبل الاستكشاف البيئي لا يكمن في فرض التكنولوجيا على الطبيعة، بل في تطوير أدوات تحترم البيئة بقدر ما تسعى إلى فهمها، وهو ما نطمح إليه في هذا الجيل الجديد من الروبوتات المائية.